Design and fabrication of a Stewart Platform

This project focuses on the design and fabrication of a Stewart platform and the implementation of certain motions using an Arduino UNO. GitHub Repo
Stewart Platform is a parallel-plate manipulator which has a wide range of use-cases in fields of surgery, flight simulators, robotics etc. The idea behind this project is to understand the working of such manipulators and to work with the Kinematics of these manipulators.
Check out the GitHub repository
Components List
1. Arduino UNO with cable


2. MG995 Servo x 6

3. Servo Horn x 6

4. Rod End Bearing Spherical Joints - 6mm x 12

5. Metal shafts with threading - 6mm x 6

6. LM2596S DC-DC Buck Converter x 3

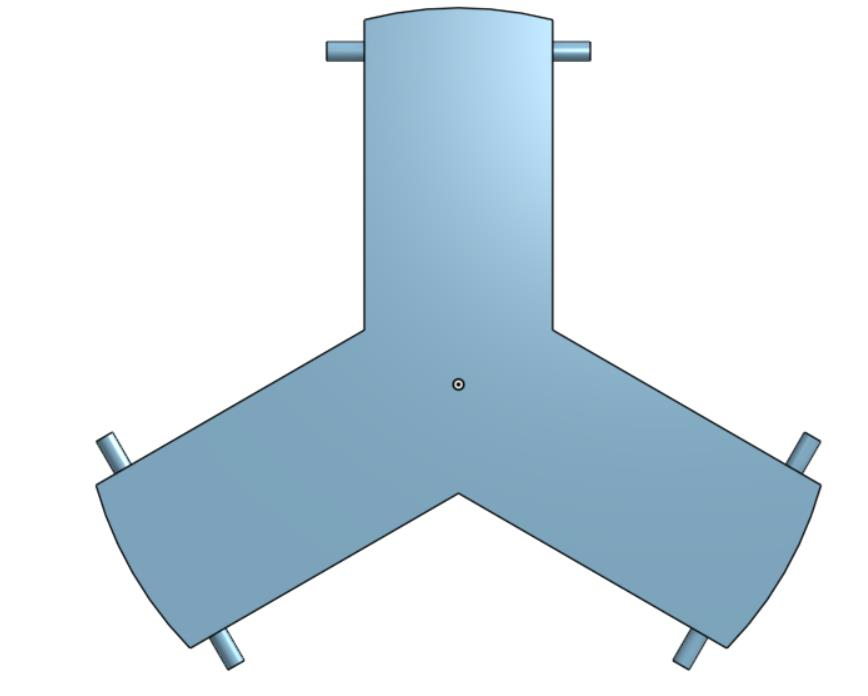
7. 3D Printed Platform
8. Wooden Base - 40x30 cm
9. Power Source AC-DC 12V-2A supply

10. Screws and nuts- M3 with 3D printed 6mm->3mm connectors x 6


11. Jumper Wires
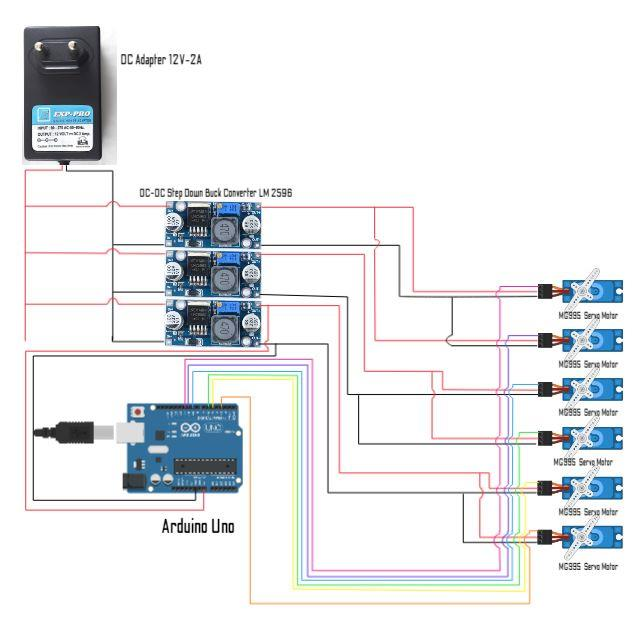
Circuit Diagram
Types of Motion
Using the Arduino IDE, we have been able to establish four different types of motion:
- Vertical Motion
- Twisting Motion
- Circular Motion in a horizontal plane
- Phase Difference or Sine wave motion
Vertical Motion
Code:
// To include the Servo library
#include <Servo.h>
Servo Servo1;
Servo Servo2;
Servo Servo3;
Servo Servo4;
Servo Servo5;
Servo Servo6;
// Servo Pin numbers
int servoPin1 = 5;
int servoPin2 = 6;
int servoPin3 = 9;
int servoPin4 = 11;
int servoPin5 = 10;
int servoPin6 = 3;
void setup() {
// Servo pins setup
Servo1.attach(servoPin1);
Servo2.attach(servoPin2);
Servo3.attach(servoPin3);
Servo4.attach(servoPin4);
Servo5.attach(servoPin5);
Servo6.attach(servoPin6);
}
void loop() {
//To move the platform vertically up and down
int i = 0;
int j = 0;
while(i <= 90) {
j =180 - i;
Servo1.write(i);
Servo2.write(j);
Servo3.write(i);
Servo4.write(j);
Servo5.write(i);
Servo6.write(j);
delay(25);
i += 1;
}
// Servo1.write(45);
// Servo2.write(135);
// Servo3.write(45);
// Servo4.write(135);
// Servo5.write(45);
// Servo6.write(135);
while(i >= 0) {
j =180 - i;
Servo1.write(i);
Servo2.write(j);
Servo3.write(i);
Servo4.write(j);
Servo5.write(i);
Servo6.write(j);
delay(25);
i -= 1;
}
}
Video:
Twisting Motion
Code:
#include <Servo.h>
Servo Servo1;
Servo Servo2;
Servo Servo3;
Servo Servo4;
Servo Servo5;
Servo Servo6;
int servoPin1 = 5;
int servoPin2 = 6;
int servoPin3 = 9;
int servoPin4 = 11;
int servoPin5 = 10;
int servoPin6 = 3;
void setup() {
// put your setup code here, to run once:
Servo1.attach(servoPin1);
Servo2.attach(servoPin2);
Servo3.attach(servoPin3);
Servo4.attach(servoPin4);
Servo5.attach(servoPin5);
Servo6.attach(servoPin6);
}
void loop() {
// put your main code here, to run repeatedly:
int i = 45;
int theta = 15;
while(i <= 45+theta) {
Servo1.write(i);
Servo2.write(90+i);
Servo3.write(i);
Servo4.write(90+i);
Servo5.write(i);
Servo6.write(90+i);
delay(75);
i++;
}
while(i >= 45-theta) {
Servo1.write(i);
Servo2.write(90+i);
Servo3.write(i);
Servo4.write(90+i);
Servo5.write(i);
Servo6.write(90+i);
delay(75);
i--;
}
while(i <= 45) {
Servo1.write(i);
Servo2.write(90+i);
Servo3.write(i);
Servo4.write(90+i);
Servo5.write(i);
Servo6.write(90+i);
delay(75);
i++;
}
}
Video:
Circular Motion in a horizontal plane
Code:
#include <Servo.h>
Servo Servo1;
Servo Servo2;
Servo Servo3;
Servo Servo4;
Servo Servo5;
Servo Servo6;
int servoPin1 = 5;
int servoPin2 = 6;
int servoPin3 = 9;
int servoPin4 = 11;
int servoPin5 = 10;
int servoPin6 = 3;
void setup() {
// put your setup code here, to run once:
Servo1.attach(servoPin1);
Servo2.attach(servoPin2);
Servo3.attach(servoPin3);
Servo4.attach(servoPin4);
Servo5.attach(servoPin5);
Servo6.attach(servoPin6);
}
void loop() {
int i = 45;
while(i <= 90) {
Servo1.write(90-i);
Servo2.write(90+i);
Servo3.write(45);
Servo4.write(135);
Servo5.write(i);
Servo6.write(180-i);
delay(75);
i++;
}
int counter = 0;
while(counter < 5) {
i = 0;
while(i <= 45) {
Servo1.write(i);
Servo2.write(180-i);
Servo3.write(45+i);
Servo4.write(135-i);
Servo5.write(90-2*i);
Servo6.write(90+2*i);
delay(75);
i++;
}
i = 0;
while(i <= 45) {
Servo5.write(i);
Servo6.write(180-i);
Servo1.write(45+i);
Servo2.write(135-i);
Servo3.write(90-2*i);
Servo4.write(90+2*i);
delay(75);
i++;
}
i = 0;
while(i <= 45) {
Servo3.write(i);
Servo4.write(180-i);
Servo5.write(45+i);
Servo6.write(135-i);
Servo1.write(90-2*i);
Servo2.write(90+2*i);
delay(75);
i++;
}
counter++;
}
i = 0;
while(i <= 45) {
Servo1.write(i);
Servo2.write(180-i);
Servo3.write(45);
Servo4.write(135);
Servo5.write(90-i);
Servo6.write(90+i);
delay(75);
i++;
}
}
Video:
Phase Difference or Sine wave motion
Code:
#include <Servo.h>
Servo Servo1;
Servo Servo2;
Servo Servo3;
Servo Servo4;
Servo Servo5;
Servo Servo6;
int servoPin1 = 5;
int servoPin2 = 6;
int servoPin3 = 9;
int servoPin4 = 11;
int servoPin5 = 10;
int servoPin6 = 3;
void setup() {
// put your setup code here, to run once:
Servo1.attach(servoPin1);
Servo2.attach(servoPin2);
Servo3.attach(servoPin3);
Servo4.attach(servoPin4);
Servo5.attach(servoPin5);
Servo6.attach(servoPin6);
}
void loop() {
int i = 45;
while(i <= 90) {
Servo1.write(90-i);
Servo6.write(90+i);
Servo3.write(45);
Servo2.write(135);
Servo5.write(i);
Servo4.write(180-i);
delay(50);
i++;
}
int counter = 0;
while(counter < 5) {
i = 0;
while(i <= 45) {
Servo1.write(i);
Servo6.write(180-i);
Servo3.write(45+i);
Servo2.write(135-i);
Servo5.write(90-2*i);
Servo4.write(90+2*i);
delay(50);
i++;
}
i = 0;
while(i <= 45) {
Servo5.write(i);
Servo4.write(180-i);
Servo1.write(45+i);
Servo6.write(135-i);
Servo3.write(90-2*i);
Servo2.write(90+2*i);
delay(50);
i++;
}
i = 0;
while(i <= 45) {
Servo3.write(i);
Servo2.write(180-i);
Servo5.write(45+i);
Servo4.write(135-i);
Servo1.write(90-2*i);
Servo6.write(90+2*i);
delay(50);
i++;
}
counter++;
}
i = 0;
while(i <= 45) {
Servo1.write(i);
Servo6.write(180-i);
Servo3.write(45);
Servo2.write(135);
Servo5.write(90-i);
Servo4.write(90+i);
delay(50);
i++;
}
}
Video:
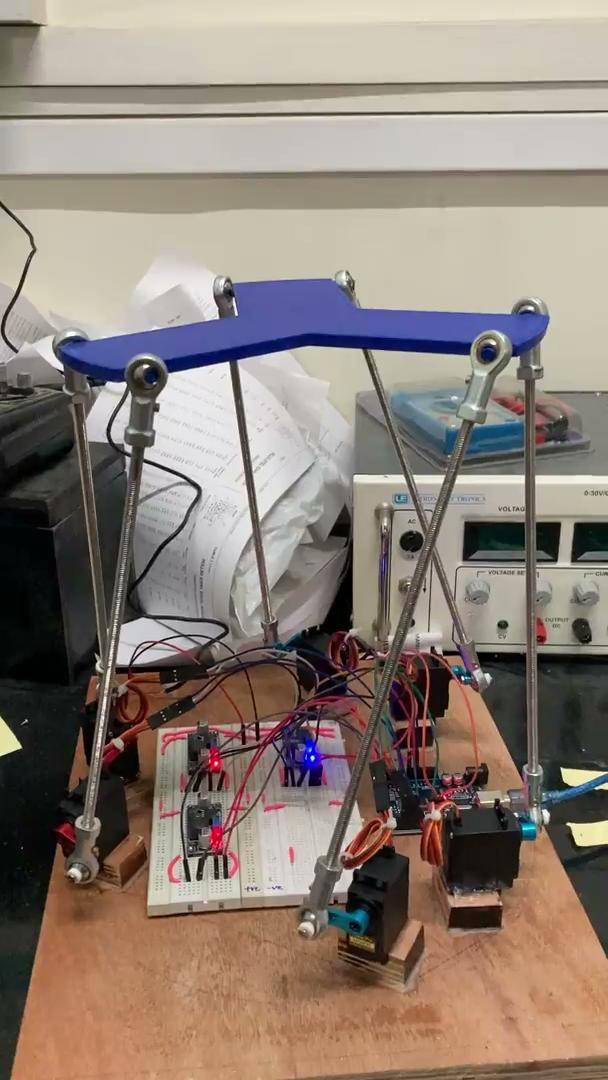
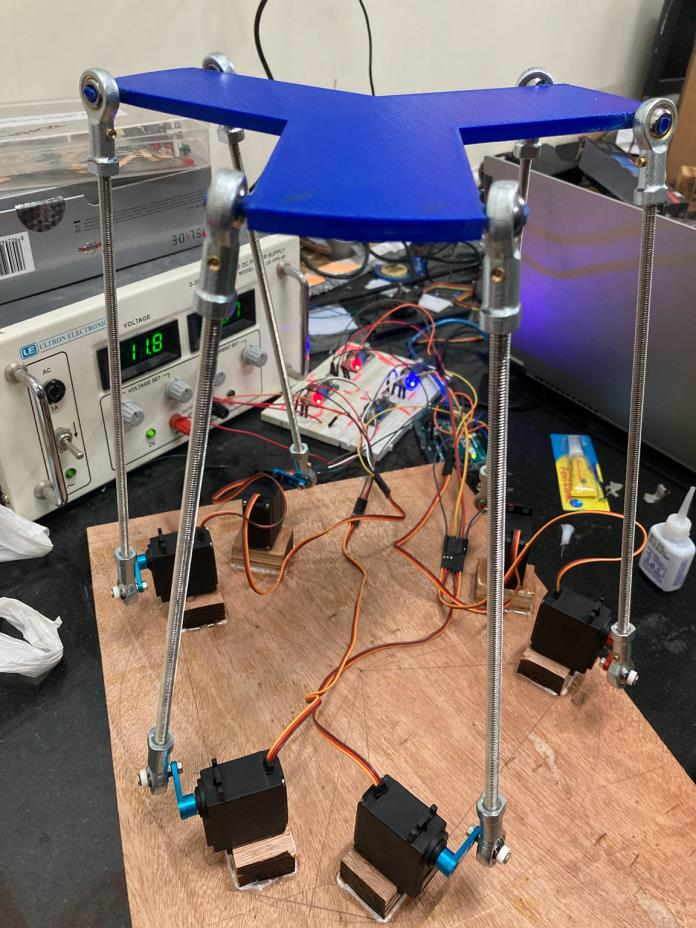
Images of the setup


This post is licensed under CC BY 4.0 by the author.