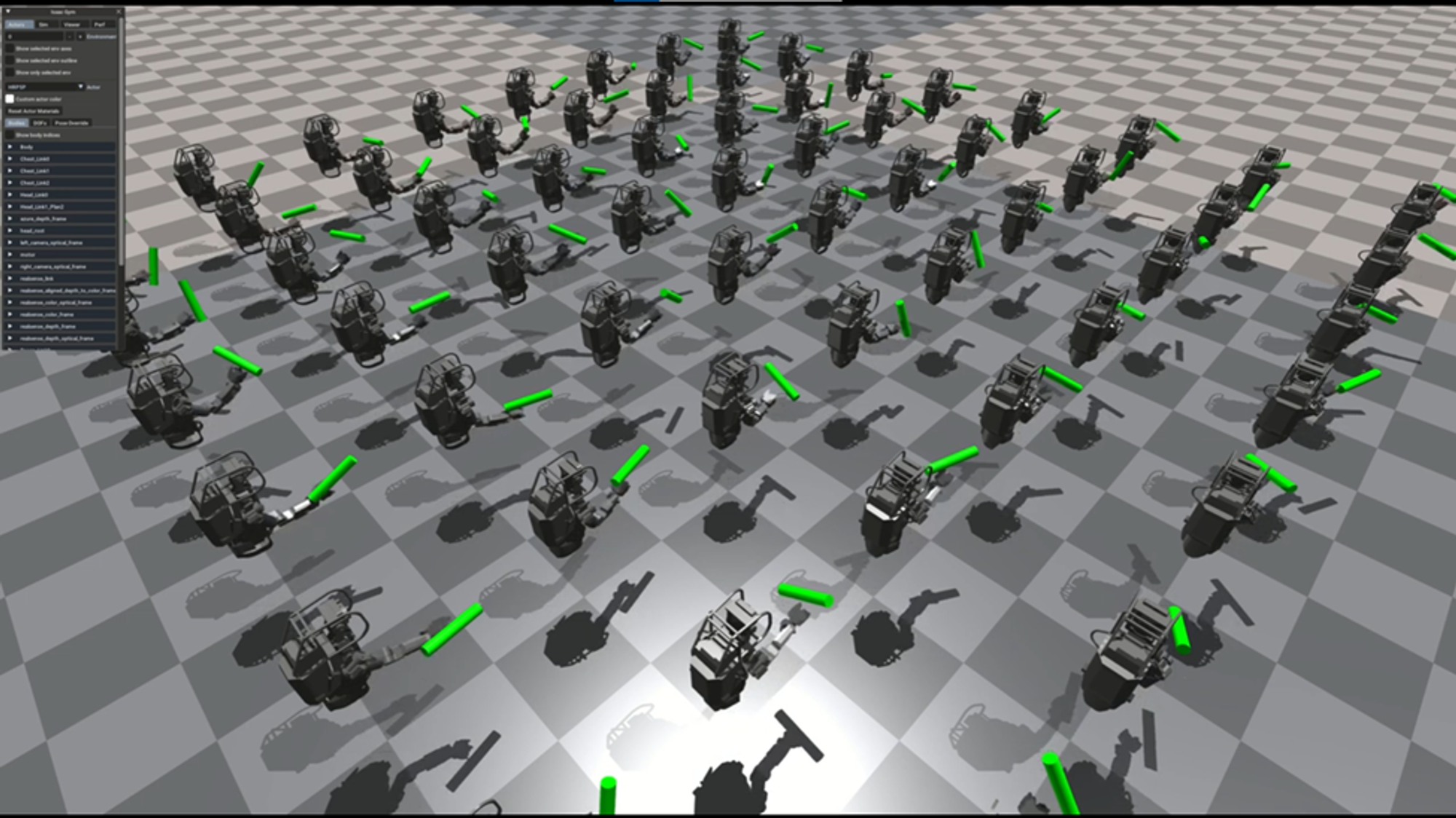
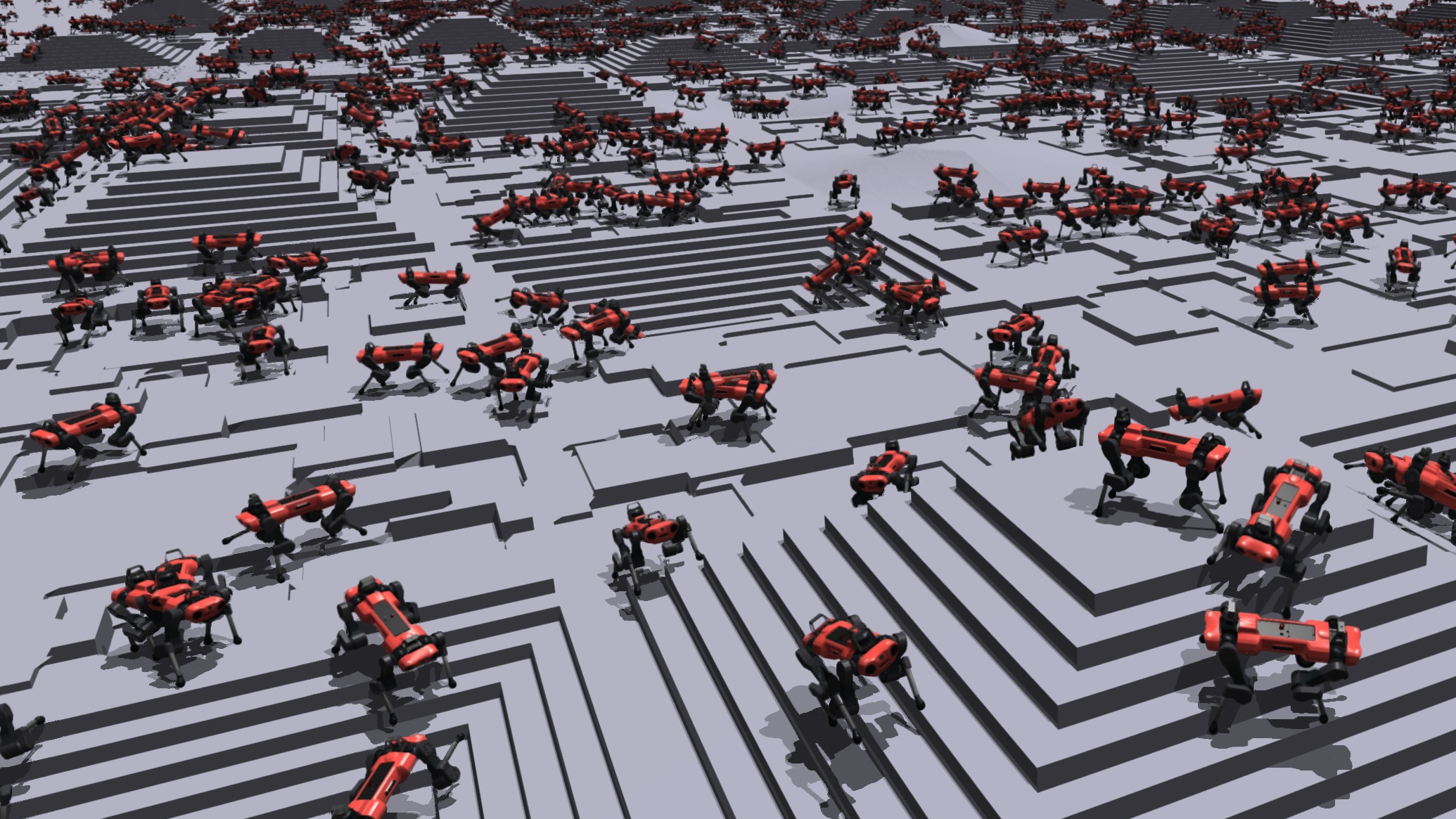
In this blog, I discuss the steps to setup an AWS instance for running IsaacGym on a cloud GPU
Isaac Gym is a software that requires a high-level GPU for running its computationally and graphically expensive simulations. But using such high-level GPU hardware is not an option everyone has, given the cost of purchasing one might be out of the comfort zone for a beginner. Hence, using a cloud GPU service such as an AWS EC2 instance with the required specifications can be helpful in running Isaac Gym for an enthusiast or a student who prefers to try out the simulator before investing on the hardware or opts for a cloud GPU rather than a local setup.
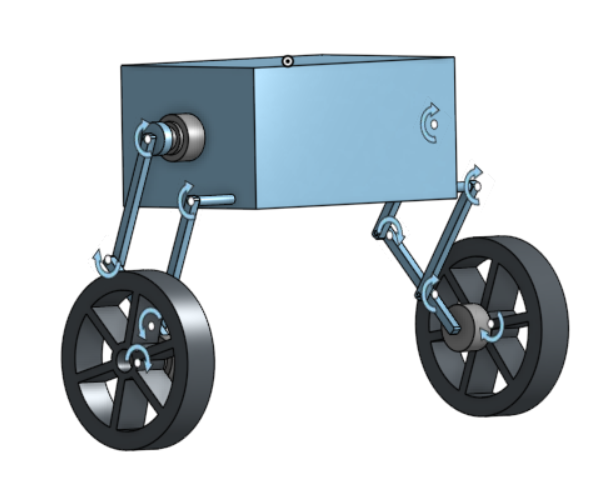
This project is focused on building a real-time system for a biped on wheels. GitHub Repo
The aim of this project is to build a biped on two wheels with self balance and jumping modes where it should be able to switch between both modes according to the necessity.
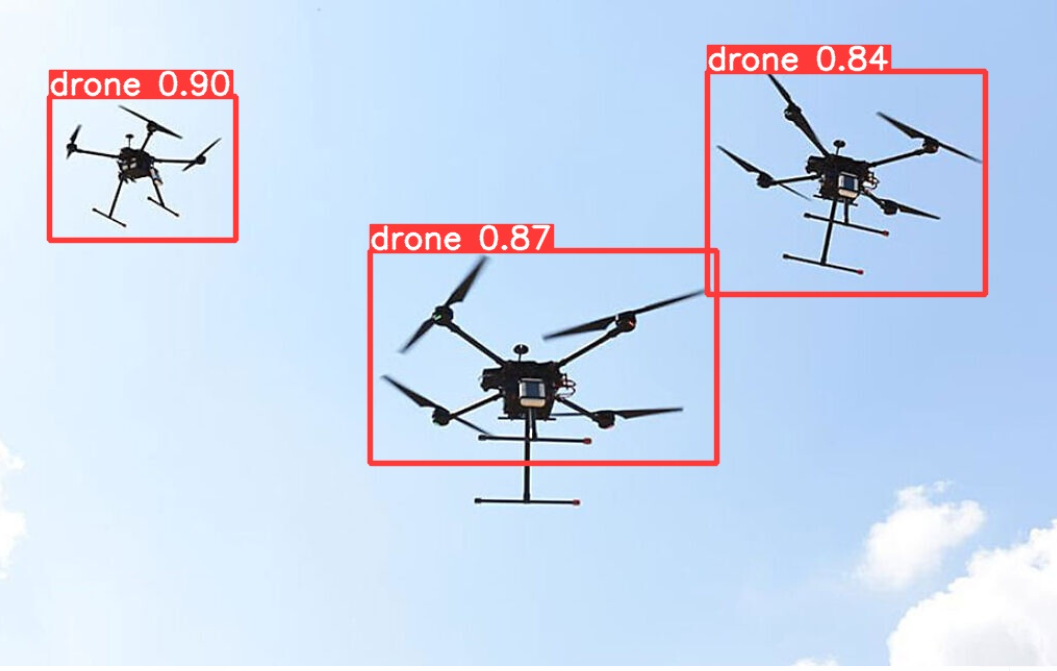
This project is focused on the object detection implementation using YOLOv3 and YOLOv5 algorithms to detect drones in images. GitHub Repo
Unmanned Aerial Vehicles (UAVs), commonly known as drones have witnessed a massive increase in the past few years. Drones are not only being used for recreational purposes but also in a vast number of applications in engineering, disaster management, logistics, securing airports, etc. Extensive usage of drones has immediately raised security concerns due to the potential of their use in malicious activities. To address this problem, this project is aimed at analyzing the available drone detection solutions which can identify drones from the day and night camera feeds in real-time. This study also aims to identify the potential challenges involved in drone detection and study the various accuracy and loss metrics in drone detection problems. Finally, the drone detection solutions will be compared and a suitable COTS drone detection solution will be suggested such that it gives the best trade-off between false alarm and miss.
This report discusses the results obtained after designing the PID, LQR controller models for the AUV/ROV and compares the pros and cons of the two different controllers against each other. GitHub Repo
The aim of this project is to design two different control system models in Simulink using PID and LQR controllers respectively and to get the results for positional and velocity parameters of the AUV based on the desired reference inputs. To tune parameters related to both the controllers to achieve better results and finally test the model physically underwater.
This project focuses on the design and fabrication of a Stewart platform and the implementation of certain motions using an Arduino UNO. GitHub Repo
Stewart Platform is a parallel-plate manipulator which has a wide range of use-cases in fields of surgery, flight simulators, robotics etc. The idea behind this project is to understand the working of such manipulators and to work with the Kinematics of these manipulators.